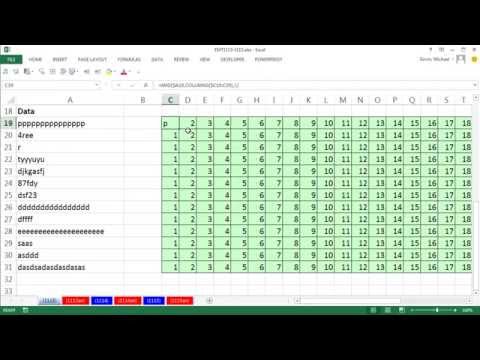
Welcome to Excel Metric number 1133. If you want to download this workbook from 1130 to 1115, click on the link below the video. In this video, we have a column filled with data and we need to break it apart so that every single character goes into a single cell, one character for each cell. Now, we're going to do this two ways - Text to Columns fixed width, and then we'll see how to do it with a formula. The formula is important if you have data dumps regularly and you want to automate the process, so it automatically updates every time you change the data. However, Text to Columns is pretty easy if it's a one-time affair. The only challenge I see is if you have a huge column, since in the dialog, we're actually going to have to draw lines for fixed width. I might want the longest one at the top so I can see it at the top of the dialog. So, I'm going to give a field name, length, control+enter, control+B, enter, and then use the LEN function. The levels just tell you how many characters are in that cell. Double click and send it down. Then, I can right click on a single cell in that column, sort largest to smallest, so the biggest one is at the top, and then I could delete this. I'm going to move this way off to the side just to keep it there as a trail. Now, I can highlight and go to Text to Columns or press Alt AE L to E. Since we don't have a character that separates what we want to split, we go to fixed width. We go to next and here it is. Watch this, this is tedious but...
Award-winning PDF software





Video instructions and help with filling out and completing Who Form 1094 B Calculator